 Un client nous a demandé à analyser par visionique des flacons
de type e-liquide qui sont en mouvement (rotation) sur un convoyeur.
L'aspect le plus important dans ce projet était la synchronisation
exacte de la prise d'images.
Un client nous a demandé à analyser par visionique des flacons
de type e-liquide qui sont en mouvement (rotation) sur un convoyeur.
L'aspect le plus important dans ce projet était la synchronisation
exacte de la prise d'images. Vous trouverez sur cette page les dernières informations sur la Sté Midi-Formatique, des idées et des modifications éventuelles pour Xlisp et Qlisp, des conseils, etc.. Si vous avez une contribution pour cette page (une question, une application, un lien intéressant), contactez-nous !
Nous vous souhaitons de Joyeuses Fêtes et une Bonne Année 2016. Excusez-nous de ne pas avoir régulièrement mis à jour ce site... trop de travail en 2015.
Nous avons terminé notre installation « contrôle de remplissage par analyse d'images ». Veuillez trouver ici une description de ce projet.
Un client nous a demandé à analyser par visionique des flacons
de type e-liquide qui sont en mouvement (rotation) sur un convoyeur.
L'aspect le plus important dans ce projet était la synchronisation
exacte de la prise d'images.
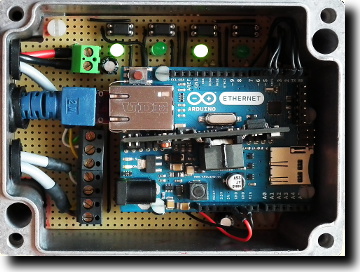
A droite notre solution : une carte Arduino Ethernet avec une petite extension électronique. Un signal de synchronisation (3 impulsions) est envoyé à la caméra pour capter le flacon tous les 120°.
 A gauche le résultat : la synthèse des 3 images permet de
vérifier l'inclinaison du bouchon. D'autres mesures sont fait sur
l'image prise au milieu : hauteur du bouchon, la position de l'anneau
et le collage correct de l'étiquette.
A gauche le résultat : la synthèse des 3 images permet de
vérifier l'inclinaison du bouchon. D'autres mesures sont fait sur
l'image prise au milieu : hauteur du bouchon, la position de l'anneau
et le collage correct de l'étiquette.
Un avantage de la carte Arduino est sa rapidité en raison de sa programmation en C : dans ce projet, nous avons obtenu un temps de scrutation qui permet l'acquisition avec une précision de 0,1mm.
La carte Arduino pilote également l'éjection des flacons à 500mm derrière la caméra.
Une nouvelle version de Qlisp est téléchargeable. Elle contient l'interface pour la nouvelle bibliothèque Vimba d'Allied Visions et quelques corrections et nouvelles fonctions.
 Pour
réaliser des applications en analyse d'images, nous avons développé un
produit innovant. Ses particularités :
Pour
réaliser des applications en analyse d'images, nous avons développé un
produit innovant. Ses particularités :
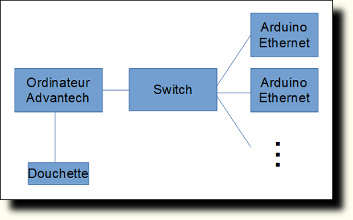
- Réduction au maximum du matériel nécessaire : l'installation consiste d'une caméra de type GigE-Vision qui est alimentée par son câble Ethernet (PoE), d'un switch et d'un ordinateur industriel (Panel Pc).
- Flexibilité au niveau du matériel et soft : l'installation peut être réalisée avec du matériel standard sans préférence d'un constructeur. La seule contrainte est d'avoir un ordinateur assez puissant pour l'application (selon la complexité de l'algorithme et le temps de calcul maximal). Le programme étant écrit en C++, il est utilisable avec des compilateurs et outils différents.
- Réduction au maximum du temps de développement : le système inclût Qlisp 5.0 pour la partie analyse d'images (article du 29/03/2014) et un outil RAD (Rapid Application Development) pour l'interface graphique. Cela nous permet à développer des applications puissantes dans un minimum de temps.
Une première installation est déjà réalisée et livrée. Pour des détails, voir ici.
L'assemblé générale extraordinaire a décidé de transférer le siège de notre société. La nouvelle adresse est : SARL Midi-Formatique, 13 A, rue Justi Pepratx, 66750 Saint-Cyprien. Pour nos contacter par internet, veuillez utiliser ce formulaire.
 Un
problème fréquent : effectuer des mesures sur des machines à
distance pour suivre la production, réaliser un tableau de bord,
détecter des dysfonctionnements, etc..
Un
problème fréquent : effectuer des mesures sur des machines à
distance pour suivre la production, réaliser un tableau de bord,
détecter des dysfonctionnements, etc..
L'équipement doit avoir un prix raisonnable... et être résistant contre le bruit électromagnétique qui existe habituellement dans un environnement industriel.
Pour notre dernière réalisation, nous avons choisi une architecture basée sur des cartes Arduino Ethernet avec technologie PoE (power over ethernet).
Si cette réalisation vous intéresse, veuillez lire aussi cet article.
Beaucoup de nos applications industrielles sont basées sur C/C++ en utilisant un outil de développement rapide. Jusqu'ici, nous avons intégré dans cet environnement la bibliothèque des routines d'analyse d'images de Qlisp qui sont écrites en C. Le désavantage : un langage compilé ne s'adapte pas très bien à la programmation des applications en analyse d'images, chaque modification nécessite une ré-compilation du projet.
Nous venons de réaliser une approche différente : une intégration non seulement des fonctions en analyse d'images, mais aussi de Xlisp. L'interpréteur tourne dans un thread, la communication avec l'application industrielle (C++ Builder) se fait via des messages et la mémoire partagée.
Si vous être intéressé par cette réalisation, contactez-nous !
Nous venons de découvrir que Qlisp a un bug avec la nouvelle version Fedora 19 : le clavier ne fonctionne pas. Sans réellement comprendre le problème (il s'agit apparemment d'une incompatibilité entre TclTk et le IBus), ici une « solution » : exécuter unset XMODIFIERS avant de lancer Qlisp, le mieux en ajoutant une ligne directement dans le script « bin/qlisp ».
Tilman Jochems a été licencié de l'Ecole IMERIR pour manquement à l'obligation contractuelle et attitude fautive. Les raisons citées sont étonnantes. Mais nous sommes surtout tristes que 18 ans de travail de M. Jochems au service d'IMERIR s'arrêtent de cette manière.
1000 téléchargements de nos logiciels libres. En tête : Xlisp et Qlisp pour Windows (31.1% et 31.0%). Merci pour votre confiance.
OfficeLite est un logiciel de Kuka
qui permet la programmation "offline" de leurs robots. La version
actuelle est 5.6. Nous regrettons que l'on ne puisse plus télécharger
la version 4.1.7 qui était une version de démonstration limitée à 30
jours.
Une nouvelle version de Qlisp est téléchargeable. Elle contient la gestion de la liaison série, une amélioration du squelette par file d'attente (l'ébarbulage selon une taille), les dilatations géodésiques rapides et la correction de quelques bogues minimes.
|
Le projet d'intégration dans l'Ecole d'Ingénieurs IMERIR/Perpignan est terminé. Ici, les étudiants travaillent sur un mini-projet pendant une durée de 40 heures :
La vidéo à droite montre les résultats obtenus. Merci aux étudiants pour la bonne ambiance pendant le projet |
Un de nos clients a importé un prototype d'Allemagne. Nous sommes intervenus pour mettre à point la partie automatisme de la machine, complètement réalisée avec des composants de Beckhoff. Notre impression : ce sont des composants bien puissants, surtout EtherCat nous a plu, mais la documentation est quelque fois trop succincte. Merci au support de Beckhoff en Allemagne qui nous a bien aidés ici.
Aujourd'hui, la machine est en fabrication et donne satisfaction à notre client.
 Pour
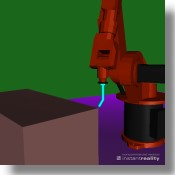
apprendre la manipulation d'un robot, il est intéressant de posséder un
outil et une pièce à usiner. Nous les avons offerts à notre KR6
virtuel.
Pour
apprendre la manipulation d'un robot, il est intéressant de posséder un
outil et une pièce à usiner. Nous les avons offerts à notre KR6
virtuel.
L'outil possède son TCP (tool center point) à x=28,66 et z=156,96, son inclinaison est de 30°. La pièce à usiner est un parallélépipède rectangle avec une dimension de 1000x500x500, posé à l'endroit x=-1100 avec une rotation de 15° autour de z.
Vous pouvez télécharger notre nouvelle version de SimuKr6 qui inclut l'outil et la pièce ici, et voir "l'usinage" de la pièce dans cette vidéo.
 Le fabricant allemand Kuka commercialise le
logiciel "OfficeLite" (une version de démonstration peut être
téléchargée sur leur site) qui permet la programmation
"offline". Il s'agit d'une simulation du logiciel installé sur les
vrais robots. Mais il n'y a pas de bras. Et à vrai dire, un robot sans
bras, c'est comme un poisson sans vélo !
Le fabricant allemand Kuka commercialise le
logiciel "OfficeLite" (une version de démonstration peut être
téléchargée sur leur site) qui permet la programmation
"offline". Il s'agit d'une simulation du logiciel installé sur les
vrais robots. Mais il n'y a pas de bras. Et à vrai dire, un robot sans
bras, c'est comme un poisson sans vélo !
C'est la raison pour laquelle nous avons développé un bras virtuel qui est commandé par le logiciel OfficeLite. Cette réalisation se compose de :
- OfficeLite V4.1.7 ou V5.5 de Kuka ;
- un serveur de position en C++ qui lit en permanence la position des axes. Pour cette partie, nous nous sommes inspirés de l'étude de Paul Chavent / IMERIR ;
- Instant Viewer de Frauenhofer IGD qui est un afficheur 3d de très bonne qualité ;
- le modèle du robot. Ici nous avons repris le travail de Martin Rohrmeier / DLR ;
- un serveur du bras virtuel en JAVA qui utilise le "External Authoring Interface" de VRML.
Il existe une vidéo qui montre notre réalisation. Et, pour que vous puissez désormais jouer comme nous avec votre robot à la maison, nous la mettons à votre disposition (avec sources complètes en C++, JAVA et VRML). Have fun !
L'Urssaf (Union de Recouvrement des Cotisations de Sécurité Sociale et d'Allocations Familiales) a effectué un contrôle sur pièces de notre gestion. Constat : "Aucune irrégularité relevée…". Dans ce cadre, nous remercions vivement Plein Sud Entreprises, et notamment Jacqueline LEY, de leurs bons conseils depuis la création de notre entreprise en 1998.
Un de nos clients était un petit peu embarrassé : un fournisseur, la SA PIV / VILLEURBANNE, semble avoir cessé son activité. Mais comment réaliser ou réparer une machine qui utilise un variateur de vitesse mécanique de cette société ?
Avec notre client, nous avons développé une solution de remplacement : la synchronisation est désormais assuré par un moteur brushless d'Emerson. La solution donne pleinement satisfaction à notre client. En plus, elle est moins chère !
 GigE Vision est une interface qui utilise le
protocole IP avec 1000mb/s. Il s'agit d'un standard industriel qui
permet l'acquisition d'images sur des grandes distances (100m) avec une
fréquence élevée (la GC1290C peut fournir, par exemple, 33 images/s en
pleine résolution). L'avantage supplémentaire est la compatibilité de
l'interface entre des caméras de constructeurs différents.
GigE Vision est une interface qui utilise le
protocole IP avec 1000mb/s. Il s'agit d'un standard industriel qui
permet l'acquisition d'images sur des grandes distances (100m) avec une
fréquence élevée (la GC1290C peut fournir, par exemple, 33 images/s en
pleine résolution). L'avantage supplémentaire est la compatibilité de
l'interface entre des caméras de constructeurs différents.
Nous avons utilisé le SDK de Prosilica (aujourd'hui Allied Vision Technologies) qui est très bien fait : Allied Vision met gratuitement à la disposition de ses clients des utilitaires pour paramétrer la caméra, des DLLs (Windows et Linux, 32bits et 64bits), des entêtes ".h" et même une multitude d'exemples qui montrent l'utilisation de la caméra. Impeccable !
L'intégration dans Qlisp était facile. Désormais, GigE Vision caméras sont utilisables en Qlisp sous Windows et Linux. Si cette interface vous intéresse, veuillez télécharger la version la plus récente de Qlisp.
Dans le cadre d'une modernisation d'une machine, nous avons remplacé des servo-moteurs FX/PCM15 d'Emerson par les modules EN208/FM4. Dans ce cadre, nous avons développé une nouvelle méthode de déphasage entre deux axes qui applique un mouvement avec une vitesse légèrement modifiée. Ce procédé implique la résolution numérique d'une équation de l'ordre 3. Le résultat est remarquable : nous avons obtenu une précision avec un écart maximal de 0.01%.
Dans le cadre d'un projet d'intégration robotique, des étudiants de l'école IMERIR ont développé une station de conditionnement : des gâteaux arrivant sur un convoyeur sont détectés à l'aide d'une caméra. La taille, l'orientation et la nature du produit sont ensuite communiquées à un robot qui se charge de l'emboîtage. Les photos montrent les étapes principales de l'algorithme en analyse d'images réalisé avec Qlisp.
 |
 |
 |
 |
|
1) Gâteaux sur convoyeur |
2) Extraction contours |
3) Reconnaissance produit |
4) Résultat |
Nous avons adapté Xlisp et Qlisp pour être compatible avec GCC sous MinGW (Minimalist GNU for Windows) : les fichiers "Makefile" et les resources ont été modifiés. Si cette amélioration vous intéresse, veuillez télécharger la version la plus récente.
C'est la huitième machine que nous venons d'équiper par notre système de freinage individuel. Cette fois-ci, il s'agissait de remplacer un système ancien qui possédait une technologie moins performante et plus difficile à entretenir. En collaboration avec l'Equipe de la Maintenance de notre client, le basculement a été réalisé en une seule journée. Nous remercions l'Equipe de la Maintenance pour son aide précieuse.
Nous développons un robot mobil et voulons utiliser
Qlisp pour la partie vision. Comment pouvons nous communiquer les
résultats de l'analyse d'images à notre application principale qui est
écrite en C sous Linux ?
La façon la plus facile représente les "tubes nommés" qui sont
créés avec la commande $mkfifo name. En Qlisp, on
ouvre le tube avec (setq fp (open "name" :direction :output)).
Pour un premier test, je propose d'ouvrir ce tube en lecture dans un
shell : $cat name. Maintenant on écrit
dans le tube avec (format fp "hello world~%"),
"hello world" sera alors transféré vers l'autre processus (le shell).
On ferme le tube avec (close fp) ; c'est
le moment où "cat" affichera la chaîne. Il est aussi possible de
communiquer dans l'autre sens, bien sûr.
Etant donné que Qlisp est livré avec ses sources, vous pouvez utiliser d'autres mécanismes de communication (sockets, DDE, shared memory, etc.) en intégrant ces fonctions dans Qlisp. Le module "distcam" donne un exemple de communication par socket avec une caméra installée sur un autre ordinateur (distcamserver).
 |
|
1) Gradient |
Comment expliquer la "ligne de partage des eaux" ? Cette transformation calcule les "crêtes plus ou moins élevées séparant deux bassins hydrographiques" [Petit Larousse Illustré, 1998]. Alors, il suffit de pouvoir s'imaginer une image comme un relief ...
Mais examinez l'image à droite. Vous y voyez des bassins et des crêtes, des vallées et des montagnes ?
Une manipulation visuelle peut aider. On ajoute des ombres aux objets : les pentes dans la direction de la lumière seront éclaircies, les autres assombries. Pour permettre une imagination parfaite, on colorie ensuite les vallées en vert et les montagnes en blanc (en appliquant une LUT = look-up-table).
Nous utilisons deux méthodes différentes pour calculer
l'ombre : par convolution et par des transformations
morphologiques. Les images ci-dessous montrent les résultats obtenus,
la lumière entrant par le nord-ouest de l'image.
Visitez aussi le site de l'Ecole des Mines de Paris pour une démonstration merveilleuse de la ligne de partage des eaux.
 |
 |
 |
 |
|
2) Relief par convolution |
3) Relief par transformations morphologiques |
||
;calcul par convolution
(conv grad '((2 1 0) (1 1 -1) (0 -1 -2)) 2 2)
;calcul par érosion/dilatation
(setq t1 (sub grad (erosion grad 65 3)))
(setq t2 (sub (dilation grad 65 3) grad))
(subl (addl (div grad 2) 128 t1) t2)
Nous avons testé les programmes Xlisp4.3 et Qlisp4.3 sur un serveur SUN (system d'exploitation : solaris, architecture : sun4v). Cela était d'autant plus intéressant que les processeurs SPARC stockent les données en format big-endian (une adresse pointe sur l'octet avec le plus grand poids). Résultat : nos programmes fonctionnent aussi sur cette architecture (compilation avec gcc). Nous mettons désormais les fichiers binaires de cette configuration à votre disposition.
Depuis plus d'un an, nous développons un distributeur de bouteilles de gaz. Ce mois, nous avons terminé notre premier prototype fonctionnel. L'installation permet l'achat en libre service de bouteilles de gaz. Veuillez lire la présentation détaillée de ce projet.
Désormais, vous pouvez compiler Xlisp et Qlisp sur une architecture 64 bits sous Linux. L'avantage est surtout la compatibilité avec les bibliothèques et modules installés sur votre ordinateur. Nous n'avons, par contre, pas encore optimisé les routines pour ce type de processeur.
Les sources et les fichiers Makefile ont été adaptés. La variable "ARCH=i386 ou ARCH=x86_64" au début du Makefile informe sur l'architecture cible. La nouvelle version que vous pouvez télécharger contient également les bibliothèques de Tcl/Tk 8.4.9 en 64 bits.
Nous avons testé les programme avec la distribution Fedora Core 4 avec un processeur AMD X2 3800+. Les versions 32 bits restent maintenues pour assurer la compatibilité des exécutables avec les processeurs de type i386. Les versions Windows sont utilisables sans modification.
 Nous avons amélioré l'acquisition d'images sous
Microsoft Windows : pendant la construction du graphe des
filtres, nous détectons la présence d'une carte de télévision et
ajoutons dans le menu les options "Crossbar" et "Tuner". Cela ne permet
pas seulement la capture des images de télévision, mais aussi
l'utilisation des entrées analogiques de telles cartes. Les images sont
capturées en format RGB24, la fréquence est de 25 images/s en format
320x240.
Nous avons amélioré l'acquisition d'images sous
Microsoft Windows : pendant la construction du graphe des
filtres, nous détectons la présence d'une carte de télévision et
ajoutons dans le menu les options "Crossbar" et "Tuner". Cela ne permet
pas seulement la capture des images de télévision, mais aussi
l'utilisation des entrées analogiques de telles cartes. Les images sont
capturées en format RGB24, la fréquence est de 25 images/s en format
320x240.
Nous avons testé le module avec les cartes "Asus Europa II" et "Terratec Cinergy 400" en utilisant DirectX 9 sous Windows 98, 2000 et XP. L'acquisition des images à partir des caméras usb et firewire reste identique.
Vous pouvez télécharger la nouvelle version de Qlisp4.3 qui contient le module ainsi que de multiples améliorations de Qlisp.
<< …quand je télécharge les fichiers et que je les extrais, il n'y a rien dans le dossier ? j'utilise winace pour décompresser. >>
Nous réunions et compressons les fichiers pour Xlisp4 et Qlisp4 sous Linux avec les outils tar et gzip. C'est la raison pour laquelle nous les avons nommés "*.tar.gz". WinZip comprend cette extension, Winace apparemment non.
Pour résoudre ce problème, il suffit de renommer les fichiers en "*.tgz". Nous le faisons désormais directement sur notre page de téléchargement.
Merci pour votre contribution.

Le programme "font.lsp" ajout une fonctionnalité importante à notre système d'analyse d'images Qlisp : écrire des chaînes de caractères.
Nous avons aussitôt modifié le programme de détection de mouvements (voir aussi l'article 02/05/03). La chaîne enregistrée sur les images permet ainsi l'identification postérieure du temps et de la date des évènements.
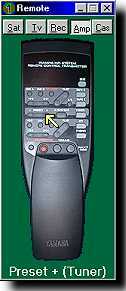 Commander
des appareils électroménagères par un ordinateur pour, par exemple,
baisser le volume de la musique dans le séjour pendant que l'on
travaille dans son bureau, cela nous a semblé une application
indispensable :->. Et voila notre
réalisation : la photo d'une télécommande est affichée sur
l'écran, il suffit de cliquer avec la souris sur les boutons... et les
commands sont exécutés.
Commander
des appareils électroménagères par un ordinateur pour, par exemple,
baisser le volume de la musique dans le séjour pendant que l'on
travaille dans son bureau, cela nous a semblé une application
indispensable :->. Et voila notre
réalisation : la photo d'une télécommande est affichée sur
l'écran, il suffit de cliquer avec la souris sur les boutons... et les
commands sont exécutés.
 A gauche
vous pouvez apercevoir l'interface graphique du programme, jusqu'à 5
télécommandes peuvent être affectées. Il faut enregistrer dans une base
de données l'image de la télécommande, la position et la forme des
boutons, les codes associés, etc.. Un petit circuit (à droite) amplifie
les signaux du port série, une diode infrarouge (LD274) émette des
impulsions d'une durée de 5us et d'une fréquence de 36kHz.
A gauche
vous pouvez apercevoir l'interface graphique du programme, jusqu'à 5
télécommandes peuvent être affectées. Il faut enregistrer dans une base
de données l'image de la télécommande, la position et la forme des
boutons, les codes associés, etc.. Un petit circuit (à droite) amplifie
les signaux du port série, une diode infrarouge (LD274) émette des
impulsions d'une durée de 5us et d'une fréquence de 36kHz.
Si ce programme vous intéresse, vous pouvez télécharger ses sources (C++Builder) et le schéma complet du circuit électronique. Si vous utilisez WindowsNT/2000/XP, vous devriez installer aussi le driver giveio.sys. Nous vous conseillons le site Linux Infrared Remote Control qui inclut une bibliothèque des codes fréquemment utilisés.
Vous n'aimez plus la couleur de votre voiture ? Ce n'est pas grave, vous pouvez la changer facilement avec Qlisp !
 |
 |
| 1) Avant | 2) Après |
Nous avons programmé cet exemple pour démontrer le modèle "IHS" (intensity, hue, saturation) : la fonction (rgb-ihs ima) de Qlisp convertit une image RGB en IHS ; nous ajoutons ensuite une constante au canal "hue" qui représente la teinte ; reste-t-il la reconversion (ihs-rgb ima) de l'image ainsi modifiée.
L'application s'appelle "changecol.lsp", elle est désormais intégrée dans Qlisp. Lancez la fonction principale (main). Un menu vous permet : 1) chargement de l'image de départ, 2) segmentation, 3) choix interactif de la couleur, 4) application de l'algorithme décrit ci-dessus.
Amusez-vous bien !
Nous remercions M. Julien DUJIN qui nous a donné l'idée pour ce programme.
DirectShow est un composant de DirectX de MS-Windows. Son architecture est basée sur la technologie COM (Component Object Model) et permet aux applications la capture et le rendement des images et du son. DirectShow est compatible avec le "Windows Driver Model (WDM)" et avec l'ancien "Video for Windows (VFW)". Qlisp utilisait jusqu'ici VFW et sa passerelle vers WDM dans son module "videocap.dll". L'utilisation de DirectShow permet une acquisition plus performante.
Le schéma suivant montre le principe de DirectShow : l'application communique avec le "Filter Graph Manager" pour construire un graphe de flux. Des "filtres" existants permettent la connexion avec la caméra, la capture des images isolées, la conversion des formats et l'affichage.
Nous avons intégré DirectShow dans Qlisp. Le module se charge dynamiquement avec l'appel (caminit "dshow"). L'acquisition d'une image couleur (24 bits) se fait par l'instruction (camsnap nr), "nr" présentant l'identification de la source. La fonction (camread) permet de transférer ensuite l'image acquise.
Permettez-nous quelques remarques sur la réalisation de ce module :
«...je voudrais traiter une image en couleur, notamment la rendre un peu plus nette ! Alors voilà, après avoir cherché de longues heures sur le net, je n'ai rien trouvé à part des trucs super compliqués auxquels je ne comprends rien...»
Nous proposons la convolution par un filtre qui amplifie les fréquences moyennes de l'image. Ce filtre possède la réponse impulsionnelle suivante :
-1 -1 -1 -1 -1
-1 0 0 0 -1
-1 0 25 0 -1
-1 0 0 0 -1
-1 -1 -1 -1 -1
Une valeur centrale plus petite augmente l'effet du filtrage, une valeur plus grande le diminue. Pour appliquer ce filtre à une image en couleur, il existe deux possibilités :
On traite identiquement chaque canal rouge, vert et bleue de l'image. Voici le code correspondant pour Qlisp :
(defun filter1(ima &optional (val 25) &aux rgb res)
(setq rgb (col-grey ima)) ;extraction de canaux RGB
(dolist(x rgb) ;traiter chaque canal
(setq res (cons
(conv x (middlepass val) 1) ;convolution
res)))
(grey-col (reverse res))) ;former le résultat
Cette méthode s'adapte bien aux filtres linéaires. L'application de filtres morphologiques, par contre, peut introduire de fausses couleurs sur les bords des objets.
Cette solution transforme d'abord l'image dans le format IHS. "I" est l'intensité de chaque pixel, "H" (hue) l'indice d'une couleur et "S" la saturation de cette couleur. Il suffit de filtrer le canal "I" pour rendre l'image plus nette. L'algorithme est 1,5 fois plus rapide que le premier filtre.
(defun filter2(ima &optional (val 25) &aux ihs i_filtered)
(setq ihs (col-grey (rgb-ihs ima))) ;extraction de canaux IHS
(setq i_filtered ;filtrer le canal I
(conv (car ihs) (middlepass val) 1))
(ihs-rgb (grey-col ;former le résultat
(cons i_filtered (cdr ihs)))))
Dans le cadre de l'analyse d'image, il est souvent plus intéressant de travailler dans l'espace IHS. L'algorithme de détection de mouvements, décrit plus bas sur cette page, utilise aussi ce format.
 |
 |
 |
| 1) Original : le boulanger arrive... |
2) Filtrage des canaux RGB | 3) Filtrage dans l'espace IHS |
 |
| Le code sur l'image est reconnu : l'appel (EanRead) fournit la liste (3 2 9 5 4 9 1 5 0 0 0 3 1) |
Une extension du programme "barcode.lsp" vous permet désormais la reconnaissance de codes-barres UPC/EAN-13. Cette identification du produit pourrait être la première étape d'un contrôle de qualité.
Un code-barres nécessite 100 pixels pour être visualisé sans faute. La résolution d'une webcam (vga : 640x480) suffit de reconnaître correctement le code.
Notre programme corrige automatiquement l'éclairage et les
fautes géométriques de la caméra. La somme des chiffres obtenus permet
le contrôle du résultat.
Pour des informations supplémentaires sur le code UPC/EAN-13, visitez le site de Russ Adams.
Le programme barcode.lsp (inclus dans la distribution de Qlisp) vous permet de créer des images qui correspondent aux codes-barres de la norme UPC/EAN-13. Voici le résultat que vous pouvez obtenir avec l'appel de la fonction (EanDraw '(5 3 9 1 5 0 3 6 4 0 9 2 9)).
Dans l'image obtenue, chaque barre possède une largeur de 1 à 4 pixels. Vous pouvez enregistrer l'image sous format BMP ou EPS et l'intégrer ensuite comme graphique dans un programme de traitement de texte.
Avec l'objectif de rationaliser l'offre de formation, les modalités de déclaration d'activité des prestataires de formation ont été modifiées par la loi n°2002-73 du 17 janvier 2002. Les nouvelles conditions vont empêcher les prestataires, qui interviennent uniquement pour le compte d'autres prestataires, d'obtenir un numéro de déclaration. L'objectif est de diminuer sensiblement le nombre de dispensateurs déclarés. Dans ce contexte, le numéro de formateur de la société Midi-Formatique a été radié.
Si vous êtes intéressé avec quel cynisme notre gouvernement (Raffarin) agit, lisez la circulaire DGEFP/GNC n° 2002-47 du 31 octobre 2002.
Le programme prend une image toutes les 250ms. Cette image est comparée avec les dernières images acquises. En cas de modification importante (un objet qui bouge), l'image sera enregistrée sous format JPEG. De cette manière, vous pouvez surveiller votre jardin ou l'entrée de votre maison sans être présent.
Voici un exemple du résultat du programme :
 Si vous voulez essayer le programme chez vous, chargez le
fichier "tomato.lsp", créez un répertoire pour les résultats
("~/images"), initialisez la caméra (init 0) et lancez l'observation
avec l'instruction (tomato). Les résultats peuvent être visualisés avec
la fonction (show).
Si vous voulez essayer le programme chez vous, chargez le
fichier "tomato.lsp", créez un répertoire pour les résultats
("~/images"), initialisez la caméra (init 0) et lancez l'observation
avec l'instruction (tomato). Les résultats peuvent être visualisés avec
la fonction (show).
P.-S. : L'utilisation du programme est strictement réservée aux particuliers. La Sté Midi-Formatique ne peut, en aucun cas, être tenue responsable en cas de litiges avec vos voisins !