 La SARL
Midi-Formatique a été créée en 1999 au sein de la pépinière
d'entreprises Plein Sud Entreprises à Rivesaltes. Son objet social est
la création de logiciels et la formation, sa spécialisation l'analyse
d'images et l'automatisme.
La SARL
Midi-Formatique a été créée en 1999 au sein de la pépinière
d'entreprises Plein Sud Entreprises à Rivesaltes. Son objet social est
la création de logiciels et la formation, sa spécialisation l'analyse
d'images et l'automatisme.La SARL
Midi-Formatique a été créée en 1999 au sein de la pépinière
d'entreprises Plein Sud Entreprises à Rivesaltes. Son objet social est
la création de logiciels et la formation, sa spécialisation l'analyse
d'images et l'automatisme.
Le gérant et le créateur est Tilman JOCHEMS, né en 1962 à Lübeck/Allemagne. M. Jochems est Ingénieur en Électrotechnique de l'université Technique d'Aix-la-Chapelle (RWTH Aachen) et Docteur en Morphologie Mathématique de l'école Nationale Supérieure des Mines de Paris.
Depuis 2015, notre siège social est à Saint-Cyprien.
 Nous
offrons une prestation complète; commençant par l'étude du problème et
finissant par sa réalisation.
Nous
offrons une prestation complète; commençant par l'étude du problème et
finissant par sa réalisation.
La partie automatisme et informatique est réalisée par nous-mêmes. En ce qui concerne la partie mécanique et électrique, nous collaborons avec des sociétés de la région.
Nous intervenons aussi dans le cadre de la maintenance et de l'optimisation d'installations existantes.
Experts en analyse d'images, nous proposons la formation dans le domaine de la morphologie mathématique et du traitement de signaux.
Dans ce chapitre, nous présenterons nos derniers projets. Pour des informations supplémentaires, veuillez nous contacter.
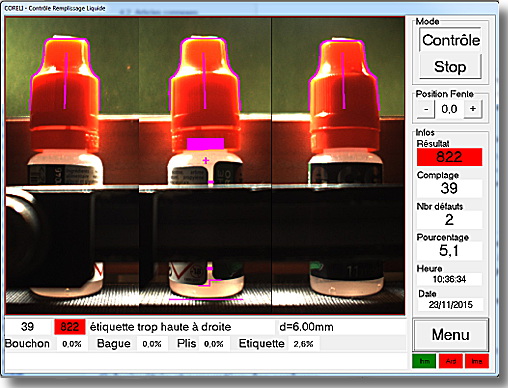
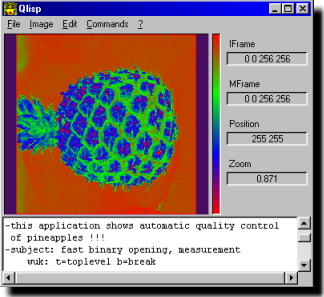
Le problème : sur une ligne de remplissage, il faut analyser les flacons, et notamment les capuchons, les bagues et les étiquettes.
Demande de notre client : détecter tous les défauts avec un taux de 100 % avant l'emballage automatique.
Notre réalisation : acquisition d'images avec une caméra GigE de Allied Visions / logiciel de contrôle basé sur Qlisp5.0 sous Windows 8 / synchronisation de la caméra et éjection avec une carte Arduino Ethernet.
Des pages spécifiques permettent de configurer l'algorithme, d'afficher et exporter des statistiques sur la production et de visualiser l'historique des défauts.
Contrôles effectués : position et inclinaison du bouchon, position de la bague, existence et position des étiquettes, détection des plis. Ces résultats sont marqués en violet sur l'image à droite.
Performance : 2 produits / s.
L'installation est en fonctionnement depuis mai 2015 et a remplacé un contrôle par vision déjà en place. Notre client est satisfait, les algorithmes fonctionnent correctement sans intervention de l'opérateur de la machine avec tous les bouchons et étiquettes utilisés.

Le problème : une machine complexe était difficile à conduire. Un réglage manuel en permanence était nécessaire pour que le produit soit bien positionné par rapport à un usinage consécutif.
Notre idée : aider le conducteur avec un outil basé sur l'analyse d'images.
Matériel utilisé : caméra couleur, GigE Vision, PoE, Allied Vision Technologies / ordinateur industriel, fanless, Panel Pc, Advantech / commutateur, PoE, Netgear.
Réalisation : acquisition d'images via Ethernet, traitement à l'aide d'un logiciel basé sur Qlisp 5.0, interface conducteur avec écran tactile, communication des résultats vers un automate OMRON avec le protocole FINS (factory intelligent network service).
Notre client est satisfait : l'installation positionne le produit avec une précision de 0,1mm et une fréquence de calcul de 0,5s.

Description : une machine possède des rouleaux qui doivent être freinés individuellement. Le couple de freinage doit être modifié dynamiquement en fonction du diamètre de chaque rouleau pour obtenir une tension constante du fil.
Notre idée : la mesure individuelle des diamètres par un processus de comptage d'impulsions.
Réalisation : armoire électrique (visualisée sur la photo) avec un automate OMRON et un ordinateur industriel permettant de commander une centaine de freins (MEROBEL). Les impulsions de chaque rouleau sont saisies par des capteurs inductifs qui transmettent leur état via un bus de terrain à l'automate. Ce dernier calcule le diamètre et déduit ensuite une valeur analogique de freinage. Cette valeur est transmise vers un amplificateur analogique qui commande le frein. Un ordinateur équipé par un écran tactile sert de l'interface d'utilisateur. L'ordinateur contient une base de données permettant l'enregistrement de produits différents. Les caractéristiques individuelles de chaque frein sont stockées dans cette base pour obtenir un réglage exact du freinage.
Cette installation a été réalisée en collaboration avec la société OCéA Ingénierie, Canohès.
 Demande : Pour tracer la production, un client nous
a demandé un équipement capable d'enregistrer des mesures sur plusieurs
machines de son atelier. L'équipement devrait s'intégrer dans un
environnement d'automatisme hétérogène.
Demande : Pour tracer la production, un client nous
a demandé un équipement capable d'enregistrer des mesures sur plusieurs
machines de son atelier. L'équipement devrait s'intégrer dans un
environnement d'automatisme hétérogène.
Notre proposition : des modules
basés
sur des cartes Arduino Ethernet PoE (power over Ethernet).  Ces cartes, programmables en C, permettent la capture d'une dizaine de
signaux numériques (dont 2 utilisables pour un comptage rapide) et de
six signaux analogiques. Le transfert des données et l'alimentation est
assuré par un simple câble Ethernet qui peut avoir une longueur jusqu'à
100m. Un commutateur central et un ordinateur industriel assurent
l'enregistrement des données dans une base de données. Un logiciel
permet l'impression des rapports ou l'exportation des données en format
csv.
Ces cartes, programmables en C, permettent la capture d'une dizaine de
signaux numériques (dont 2 utilisables pour un comptage rapide) et de
six signaux analogiques. Le transfert des données et l'alimentation est
assuré par un simple câble Ethernet qui peut avoir une longueur jusqu'à
100m. Un commutateur central et un ordinateur industriel assurent
l'enregistrement des données dans une base de données. Un logiciel
permet l'impression des rapports ou l'exportation des données en format
csv.
Réalisation : équipement de plusieurs machines avec des modules de mesure, réalisation de capteurs de distance basés sur des GP2Y de Sharp, programmation d'un logiciel pour un Panel PC avec écran tactile et douchette.
L'installation rend service 24/7 depuis plusieurs mois.
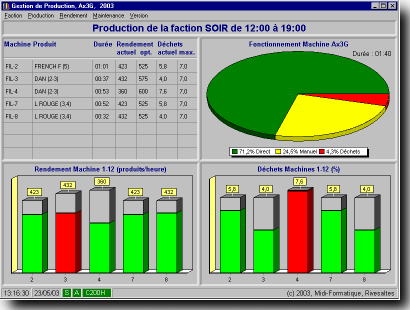
Description : plusieurs machines ont été réunies dans une unité de production. Cela a permis une production plus rationnelle, mais a rendu difficile la détection d'anomalies sur les machines.
Réalisation : un logiciel de suivi de production. Chaque produit arrivant et sortant est comptabilisé. L'interface graphique montre le suivi de la fabrication et le bon fonctionnement de l'installation. Une base de données stocke les résultats de la fabrication. Sa consultation permet au service de la maintenance de vérifier le rendement et le pourcentage de déchets de chaque machine.
Description : pour le contrôle de qualité dans la fabrication de papier, une caméra couleur a été installée. Elle permet à l'opérateur de la machine de vérifier la structure du papier déroulant rapidement. La caméra est positionnée par un moteur EMERSON.
Réalisation : interface logiciel sous forme d'une DLL permettant la commande de la caméra via le protocole Modbus. Programmation du moteur EMERSON.
L'installation a été réalisée en collaboration avec OCéA Ingénierie et la société VISISCAN, Paris.
|
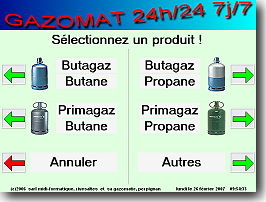
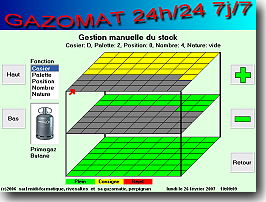
Description : nous avons collaboré avec la société Gazomatic pour réaliser un automate de distribution de bouteilles de gaz. Le cœur de cette installation est un robot capable de chercher les bouteilles dans des palettes et de les livrer aux clients dans un sas. |
 |
|
 |
 |
|
| Le robot cherche la bouteille | Livraison dans le sas | Prototype du robot |
Avantages : achats par carte bancaire ; indépendance d'une station de service ou d'un supermarché ; disponibilité 24h/24 ; confort pour le client qui peut stationner sa voiture directement devant l'automate ; et surtout : remplissage de l'automate de distribution par grue ou par chariot élévateur ce qui va réduire les coûts de livraison.
Réalisation : nous avons réalisé un prototype fonctionnel dont la société Midi-Formatique a conçu l'ensemble de la partie informatique et automatisme. La partie puissance (robot 3 axes, les portes du sas, …) est commandée par un automate CJ1M d'OMRON qui échange en permanence ses informations avec un PC industriel (protocole Toolbus). Le PC présente aussi l'interface graphique, gère le stock (base de données), informe le livreur par email en cas de rupture de stock, permet la télémaintenance, communique avec l'unité de payement, imprime les tickets, …
Malheureusement, ce projet a été abandonné pour des raisons personnelles.
 |
 |
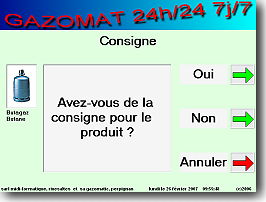 |
| Choix du produit | Gestion du stock | Retour consigne |
 Nous
avons développé un système d'analyse d'images pour concevoir des
applications en vision artificielle et pour enseigner ce domaine.
Nous
avons développé un système d'analyse d'images pour concevoir des
applications en vision artificielle et pour enseigner ce domaine.
Le logiciel est basé sur l'interpréteur Lisp. Nous y avons ajouté une centaine de fonctions d'analyse d'images programmées en C (morphologie mathématique : dilatations, érosions, filtres, segmentation, ... traitement de signaux : convolution, Fourier ...).
L'acquisition d'images est possible par des interfaces standard (DirectShow et VideoCapture de MS-Windows ou V4L de Linux). On peut traiter des images binaires, en niveaux de gris ou en couleurs.
Qlisp utilise les bibliothèques et les sources de Lisp et de TclTk qui sont de type "logiciels libres". Aussi avons-nous décidé de distribuer Qlisp gratuitement dans sa version complète, notre métier restant la conception et la réalisation des applications industrielles et scientifiques en analyse d'images.
Pour avoir des informations supplémentaires sur Qlisp, visitez aussi notre "page visionique".
Description : une machine nécessite le contrôle de rotation d'une centaine de rouleaux.
Réalisation : un automate RPX de CROUZET permet en raison de son interface AS-i le câblage facile de capteurs inductifs qui donnent l'information sur la rotation de chaque rouleau. La machine est arrêtée en cas de déchirure, le numéro du rouleau concerné est communiqué via Modbus à l'automate principal de l'installation. Nous avons réalisé la programmation de l'automate, notre client l'installation mécanique et électrique.
Notre deuxième activité est la formation. Ce chapitre montre l'exemple du cours "Analyse d'Images", les travaux pratiques sont assurés avec le logiciel Qlisp que nous mettons à votre disposition.
Introduction à la vision artificielle
Contenu : fonctionnement d'une caméra (optique, capteur CCD, norme CCIR, interfaces digitales), systèmes de traitement, transformations de base (look-up-table, histogramme, égalisation par histogramme), format d'enregistrement, introduction au système d'analyse d'images Qlisp (principes, fonctions de base, programmation).
Durée : 4 heures de cours, 8 heures de travaux pratiques
Morphologie mathématique
Contenu : dilatation, érosion, distance euclidienne et géodésique, comptage, érosion ultime, ouverture, fermeture, filtres, propriétés algébriques des transformations, conception de filtres, segmentation, algorithmes à base de la file d'attente
Durée : 8 heures de cours, 16 heures de travaux pratiques
Traitement de signaux appliqué aux images
Contenu : extraction de contours et leur description par la courbure, convolution de signaux, construction et interprétation de filtres, transformation de Fourier et FFT, filtrage dans le domaine fréquentiel.
Durée : 8 heures de cours, 12 heures de travaux pratiques
Si vous êtes intéressé par une intervention dans votre établissement, que ce soit en analyse d'images ou dans des domaines tels que la programmation, TCP/IP, les interfaces graphiques, la compilation, le traitement de signaux, contactez-nous !
Dans ce chapitre nous exposerons, à titre indicatif, les outils que nous utilisons fréquemment pour nos réalisations.
Nous sommes persuadés que la partie la plus importante dans un projet est la phase d'étude et de conception. C'est à ce moment où des connaissances générales et théoriques du domaine de l'application et de l'informatique sont indispensables.
Aussi restons-nous très ouverts aux outils choisis par nos clients.
|
Domaine |
Outils |
|
Systèmes d'exploitation |
Windows, Linux |
|
Langages informatiques |
C, C++, Lisp, Java, Assembleur |
|
Automates |
Omron, Emerson, Beckhoff, Kuka, Crouzet |
|
Langages d'automatisme |
Schéma à Relais, Grafcet, ... (CEI 61131-3), Basic, Krl |
|
Internet |
Html, JavaScript, Php |
|
Interfaces graphiques |
C++Builder, Tcl/Tk, Api Win32, Owl |
|
Base de données |
Paradox, dBase, Ldap |
| Réseau | Tcp/Ip, Sockets, Rpc, Com, Smtp |