Summary
Introduction
 Midi-Formatique SARL, a limited liability company, was created in 1999
in the "Plein Sud Entreprises" technology center at Rivesaltes, France.
Its field of operation is software programming and training; it is
specialized in image analysis and industrial automation.
Midi-Formatique SARL, a limited liability company, was created in 1999
in the "Plein Sud Entreprises" technology center at Rivesaltes, France.
Its field of operation is software programming and training; it is
specialized in image analysis and industrial automation.
Founder and manager is Tilman JOCHEMS, born in 1962 at Lübeck,
Germany. He is an engineer with a Diploma in Electrical Engineering
from the Technical University of Aachen, Germany, and a PhD in
Mathematical Morphology from the School of Mines of Paris, France.
Since 2015, our head office is in Saint-Cyprien.
 We offer
you a complete service, from the analysis of a problem to its practical
solution.
We offer
you a complete service, from the analysis of a problem to its practical
solution.
We carry out ourselves the automation and data processing
involved. As far as the mechanical and electrical side is concerned, we
collaborate with local companies.
We also maintain and optimize existing installations.
As experts in image analysis, we offer training in
mathematical morphology and signal processing.
 Top
Top
Realizations
In this chapter, we present our latest projects. For
additional information, please contact
us.
Control of e-liquid
filler by image analysis
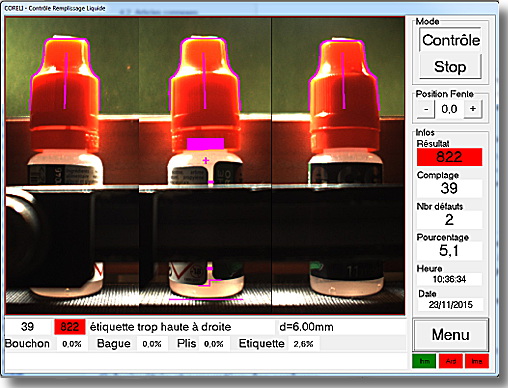
The problem: at the end
of a filling line, control of the
bottles including caps, rings and labels was needed. Our customer's
request: 100% defect detection before the automatic packaging.
Our realisation: image
acquisition with an Allied
Visions GigE camera / image analysis using Qlisp5.0
under Windows 8 /
synchronisation of the camera and ejection of bottles with an Arduino
Ethernet card.
We realised specific pages in order to configure the
algorithm, to
display and export statistics of the production and to give a history
of the defects.
Controls: position and
inclination of caps, position
of rings, existence and position of the labels, detection of wrinkles.
These results are marked in purple on the right side image.
Performance: 2 products/s
The installation works since may 2015 and replaced an existing
vision
control. Our client is satisfied, the algorithm works without the
operator's intervention with all caps and labels used.
Début
Driving a
machine with the help of image analysis

The problem: a complex machine was
difficult to drive. A manual adjustment was needed all
the time in order to position the product for a consecutive
machining.
Our idea: help the driver with a program
based
on image analysis.
Used equipment: colour camera, GigE
Vision, PoE,
Allied Vision Technologies / industrial computer, fanless, Panel Pc,
Advantech / switch, PoE, Netgear.
Realization: image acquisition via
Ethernet, data processing by using a software
based on Qlisp 5.0, graphical user interface with touch
screen, communication of the results to an OMRON PLC with FINS (factory
intelligent network service).
Our client is satisfied: the installation positions the
product with an accuracy of 0.1mm and a frequency of 0.5s.
Top
Individual braking
 Description:
the bobbins of a machine for textile manufacturing must be braked
individually. The torque has to be modified dynamically according to
the diameter of each bobbin to obtain a constant tension of the threads.
Description:
the bobbins of a machine for textile manufacturing must be braked
individually. The torque has to be modified dynamically according to
the diameter of each bobbin to obtain a constant tension of the threads.
Our idea: measuring the diameters of each
bobbin by a process of impulse counting.
Realization: electrical equipment (see the
photograph) with an OMRON controller and an industrial computer
allowing to control up to 96 brakes (MEROBEL). Inductive sensors
transmit the state of each bobbin through an industrial network to the
controller. This device calculates the diameters of the bobbins and
deduces analogue braking values. The values are transmitted to
amplifiers that actuate the brakes. A computer equipped with a touch
screen serves as user interface. The computer contains a database that
allows processing different products. The individual characteristics of
each brake are stored in this database to obtain the exact adjustment
of braking.
This installation was realized in collaboration with OCéA,
Canohès.
Top
Remote measurements

Request: a customer asked us to record
measurements on several machines. Our
installation should work in a heterogeneous automation environment
without modifying the existing installations.
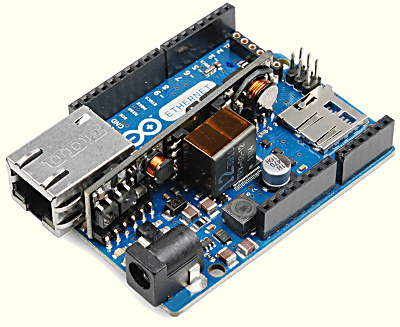
Our proposition: independent modules based
on Arduino
Ethernet PoE cards (PoE=power over Ethernet).
These cards are programmable in C and allow the capture of about ten
digital signals (including 2 suitable for quick counting) and six
analogue signals. Data transfer and power is provided by simple
Ethernet cables which may have a length up to 100m. A central switch
and an industrial computer ensure the recording of the data in a
database. Our proposed software allows printing of reports or exporting
in csv format.
Realization: equipment of several machines
with measurement modules, realization of
distance sensors based on the Sharp GP2Y, program in C++ for a Panel PC
with touch screen and bar-code scanner.
The installation works correctly 24/7 since several months.
Top
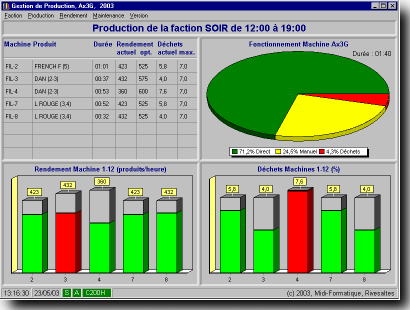
Production recording
Description: several machines had been
joined together to form a manufacturing unit. This allowed more
efficient production, but made the detection of machine anomalies more
difficult.
Realization: a program for keeping track of
production. Each arriving and outgoing product is recorded. The graphic
interface shows how the installation is working at a given moment. A
database stores the results of manufacture. Consulting it allows the
maintenance service to check the output of each machine and the
percentage of its waste.
Top
Positioning a
colour camera
Description: a colour camera was installed
to enhance the quality of paper production. The operators can now
control on a screen the structure of the fast moving paper. An electric
motor produced by EMERSON moves the camera into the desired position.
Realization: a software interface (DLL)
allowing the positioning of the camera via the Modbus protocol,
programming of the motor's controller.
The installation was realized in collaboration with OCéA,
Canohès and VISISCAN, Paris.
Top
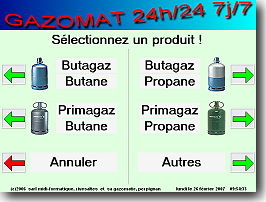
Distribution
automat
Advantages: purchase by credit card;
independence of gasoline stations and supermarkets; 24h/24
availability; customers comfort who can leave their cars directly in
front of the automat; and especially: filling of the distribution
automat by crane or lifting truck which will reduce the costs of
delivery.
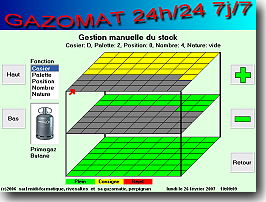
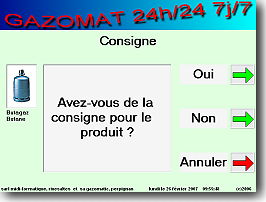
Realization: we have realized a functional
prototype, the company Midi-Formatique conceived and carried out all
the data-processing/automatism part. The power equipment (robot of 3
axes, doors of lock,...) is ordered by the controller CJ1M of OMRON
which permanently exchanges its information with an industrial computer
(protocol toolbus). The computer presents also the graphical interface,
manages the stock (database), informs the deliveryman by email about
out-of-stock condition, allows remote maintenance, communicates with
the payment unity, prints tickets, ...
Unfortunately, this project was abandoned for personal reasons.
 |
 |
 |
| Choice of product |
Stock control by service |
Return of consigns |
Top
Image analysis system QLISP
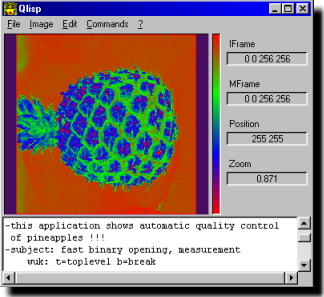 We have
developed an image analysis system in order to realize applications in
artificial vision. We also use it for teaching.
We have
developed an image analysis system in order to realize applications in
artificial vision. We also use it for teaching.
The software is based on the Lisp interpreter. We added about
a hundred functions that realize image processing. They are exclusively
programmed in C (mathematical morphology: Dilations, erosions, filters,
segmentation... signal processing: Convolution, Fourier...).
Frame grabbing is possible through standard interfaces
(DirectShow or VideoCapture for MS-Windows, V4L for Linux). You can
treat binary, gray-level or color images.
Qlisp uses the libraries and the sources of Lisp and TclTk,
which are shareware applications. That is why we decided to provide
Qlisp for free in its complete
version, too. Our business remains the design and the
realization of industrial and scientific applications in image analysis.
If you are interested in additional information about Qlisp,
see the chapter about image
analysis.
Top
Rotation control
 Description:
a machine requires the rotation control of hundreds of bobbins.
Description:
a machine requires the rotation control of hundreds of bobbins.
Realization: the industrial network AS-i of
the controller RPX from CROUZET allows easy wiring of inductive
sensors, which give information about the rotation of each bobbin. The
machine is stopped in the case of tear; the number of the roller
concerned is communicated via Modbus to the principal controller of the
installation. We carried out the programming of the controller; our
customer provided the mechanical and electrical installation.
Top
Training
Our second activity is teaching. This chapter shows, as an
example, our course "Image Analysis". Practical work is done with our
Qlisp software that we put at your disposal.
Introduction to artificial vision
Contents: cameras (optic, CCD sensor, CCIR standard, digital
interfaces), image analysis systems, basic transformations
(look-up-table, histogram, equalization by histogram), format of
recording, introduction to the software Qlisp (principles, basic
functions, programming).
Duration: 4 hours of lectures, 8 hours of practical exercises
Mathematical morphology
Contents: dilation, erosion, Euclidean and geodetic
distance, counting, ultimate erosion, opening, closing, filters,
algebraic properties of transformations, design of filters,
segmentation, queue-based algorithms.
Duration: 8 hours of lectures, 16 hours of practical
exercises
Signal processing applied to images
Contents: contour extraction and their description by
curvature, convolution of signals, filter construction and
interpretation, Fourier transformation and FFT, filtering in the
frequency space.
Duration: 8 hours of lectures, 12 hours of practical
exercises
If you are interested in training on your premises - in image
analysis or in topics such as programming, TCP/IP, graphical
interfaces, compilation, signal processing - contact us.
Top
Tools
In this chapter we will indicate the tools that we frequently
use for our realizations.
We are convinced that the most important part in a project is
analysis and specification. In this phase, general and theoretical
knowledge of the application and of data processing is required.
As far as the tools are concerned, we remain very open to our
customers' wishes.
|
Field
|
Tools
|
|
Operating systems
|
Windows, Linux
|
|
Data-processing languages
|
C, C++, Lisp, Java, Assembler
|
|
Controllers
|
Omron, Emerson, Beckhoff, Kuka, Crouzet
|
|
Languages of automation
|
Ladder diagram, Grafcet, ... (CEI 61131-3), Basic, Krl
|
|
Internet
|
Html, JavaScript, Php
|
|
Graphical interfaces
|
C++Builder, Tcl/Tk, Api Win32, Owl
|
|
Databases
|
Paradox, dBase, Ldap
|
| Network |
Tcp/Ip, Sockets, Rpc, Com, Smtp |
 Home
Top
Vision
Home
Top
Vision


